SW GNSS Software de post proceso para PC
$0.00
SW GNSS es un software gratuito para el post procesamiento de datos GNSS.
Descripción
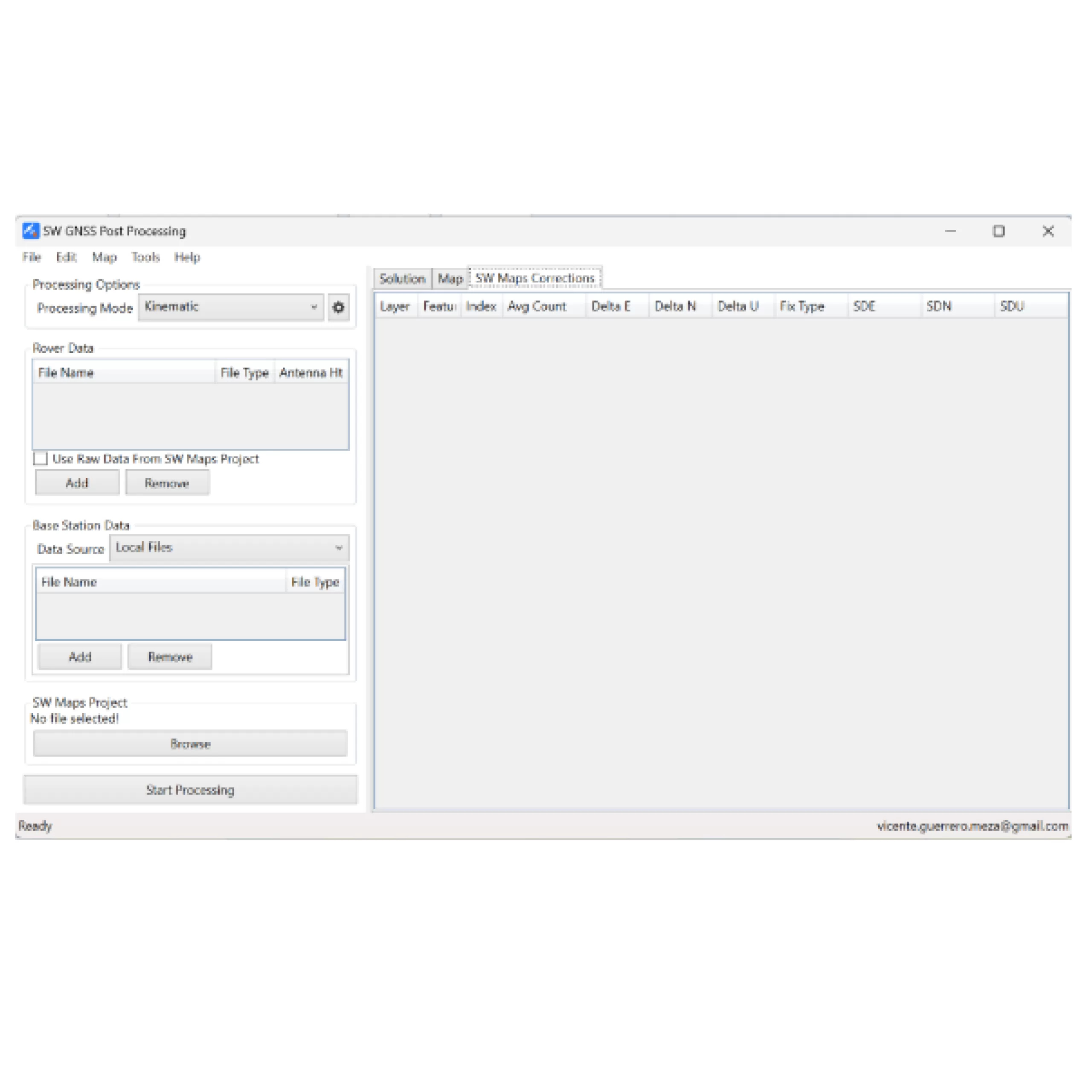
Soporta procesamiento estático, cinemático y PPP. Las posiciones corregidas se pueden exportar como archivos de Excel. La corrección se puede aplicar a un proyecto de SW Maps y el proyecto corregido se puede exportar como Shapefiles, GPKG o KMZ. Los archivos RINEX, u-blox UBX, Septentrio SBF y RTCM3 son compatibles como entrada para el rover y la estación base. El motor de post procesamiento se basa en el programa RTKLIB de código abierto de T. Takasu.
http://www.rtklib.com/SW GNSS incluye la versión modificada de RTKLIB por rtklibexplorer. https://github.com/rtklibexplorer/RTKLIB